Расширенный семинар
лаборатории динамических информационно-управляющих систем им. Б. Н. Петрова ИПУ РАН
Руководитель семинара:
ведущий научный сотрудник лаборатории динамических информационно-управляющих систем им. Б. Н. Петрова ИПУ РАН, д.т.н. М.М. Чайковский
Тема:
Навигация пешехода с использованием БИНС, закрепленных на стопах
Докладчик:
Брагин Александр Викторович, аспирант 2 г/о МГУ имени М.В. Ломоносова, инженер лаборатории №1 ИПУ РАН.
Научный руководитель - Болотин Юрий Владимирович
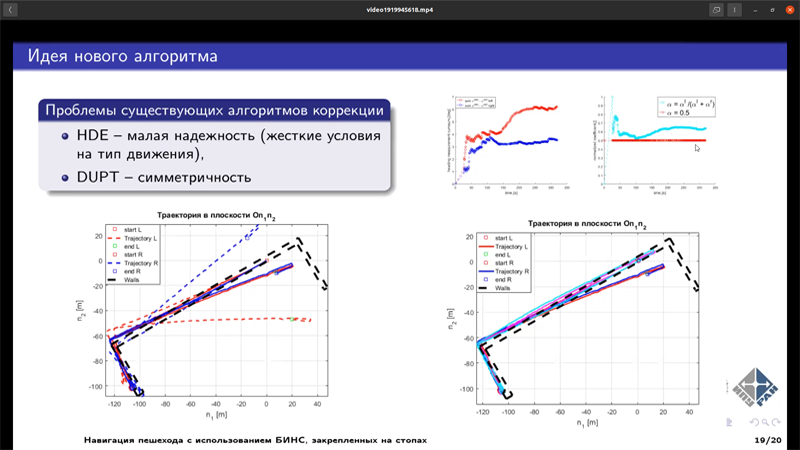
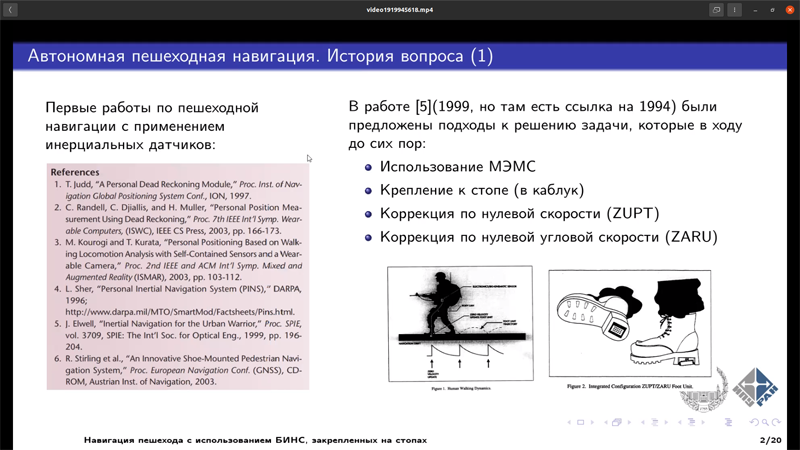
Рассматривается задача автономной пешеходной навигации при помощи инерциальных измерительных блоков (ИИБ), закрепленных на стопах человека. В основном подобная задача возникает при навигации в помещении, поскольку в этом случае невозможна коррекция по информации спутниковых навигационных систем. Возможны различные сценарии применения этой технологии: военное дело, экстренные службы, спортивные приложения. Известны различные методы повышения точности решения данной задачи. Среди них: коррекция по нулевой скорости, коррекция по ограничению на расстояния между стопами (в случае, если ИИБ установлены на обоих стопах), коррекция по прямолинейности движения.
В докладе рассматриваются особенности применения расширенного фильтра Калмана, который используется во всех типах коррекции. Обсуждается состоятельность этого широко распространенного инструмента при коррекции по нулевой скорости, а также по расстоянию между стопами. Продемонстрированы возможности алгоритма коррекции по прямолинейности движения. Кроме того, показана работа всех перечисленных алгоритмов на реальных данных и проанализировано их влияние на точность навигации.